Eseguire test può rilevarsi oneroso quando le parti del sistema possono creare un pericolo, un costo elevato, spazi elevati o semplicemente l’indisponibilità del materiale.
In questo caso la simulazione permette di eseguire un analisi cinematica e raggiungere un discreto livello di confidenza e una selezione netta, prima di arrivare ad eseguire i test finali sui prodotti finiti.
In questa esperienza, la necessità di condurre una campagna di test per la validazione del sistema finale, arrivando a definirne gli errori e i setup necessari.
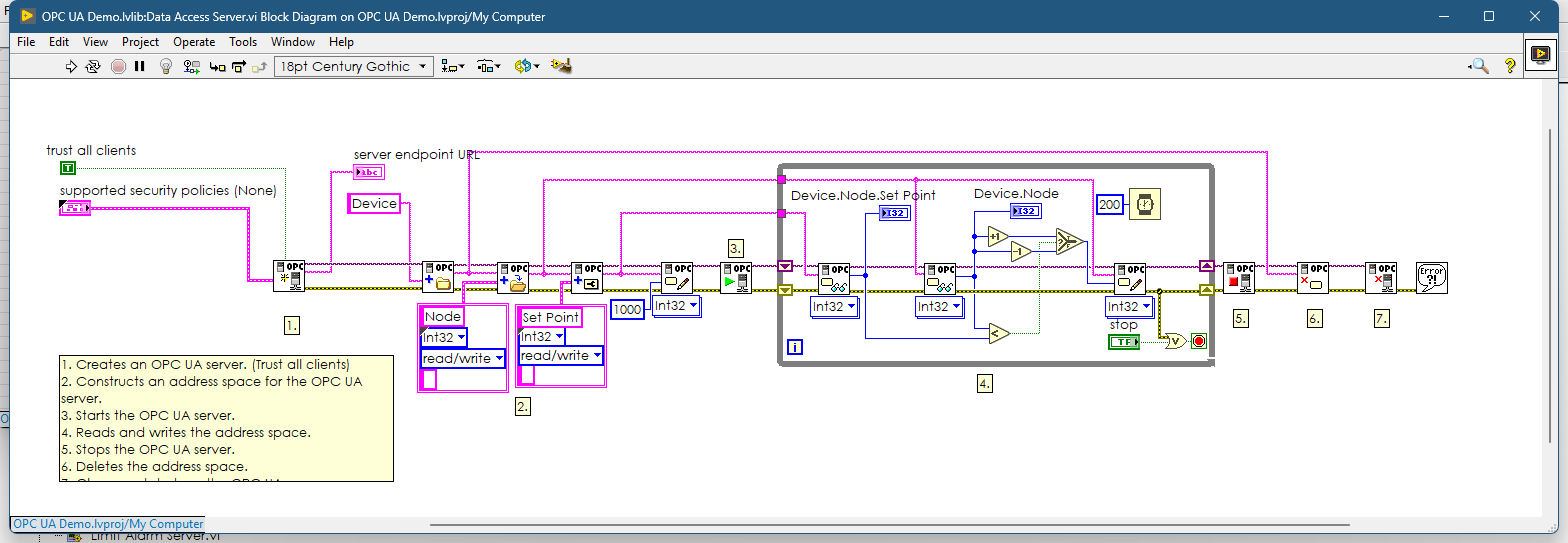
Il sistema può inoltre lavorare sia con il sistema simullato da un modello software integrato in una CRIO, ma anche lavorare sul sistema reale .